INSPEÇÃO EM MANCAIS DE MOTORES E POSICIONAMENTO
Home / Cases Recentes / 0 - Automobilistica / INSPEÇÃO EM MANCAIS DE MOTORES E POSICIONAMENTO

O sistema de posicionamento e medições de mancais tem duas aplicações com Smart câmeras Wenglor.
Em primeiro lugar, Uma das aplicações tem como objetivo passar as coordenadas para o robô sobre o posicionamento de Mancais.
Além disso, finalmente, a segunda aplicação é para verificar o posicionamento e a presença de pinos para cravamento em mancais.
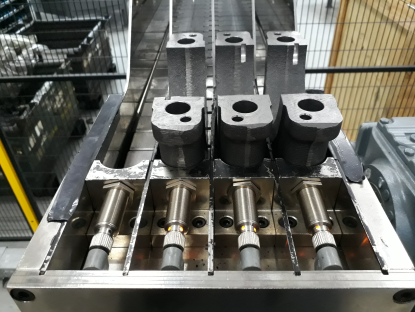
O Mancal possui dois furos, um de diâmetro maior centralizado onde a garra do robô é posicionada para o manuseio da peça, e outro deslocado onde o pino é cravado.
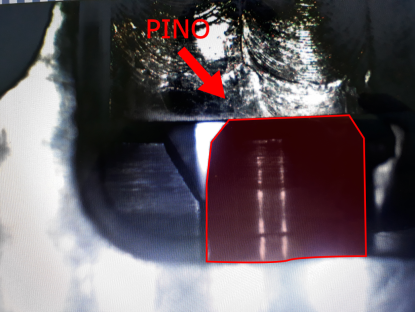
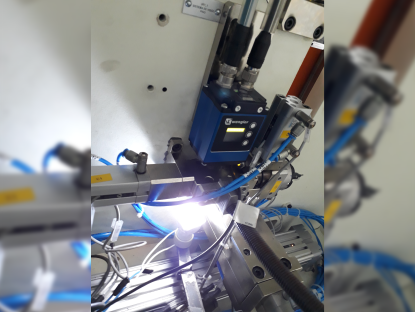
A Smart câmera Wenglor fixada na ferramenta do robô, verifica a posição do Mancal através do furo onde será cravado o pino. Assim, o furo deve estar sempre na mesma posição no momento em que o pino é cravado, para isso o robô possui uma ferramenta com duas garras iguais, uma em cada extremidade para que possa pegar a peça nas duas posições, de acordo com a informação enviada pelo sistema de visão. Com o Mancal posicionado corretamente a Smart câmera da estação de cravamento de pinos faz a inspeção, verificando qual a posição do pino e se há pino na câmara ou não. Enviando as informações via PROFINET para o CLP, finalizando o ciclo.









